您現在的位置是:首頁 » scratch編程資訊
資訊內容
Scratch編程機器人第31課 - 巡線小車
極客小將2020-11-19-
第31課 巡線小車一學習導航
第31課 巡線小車 一學習導航
一學習導航

往期精彩回顧Scratch編程機器人第18課 - 定時風扇Scratch編程機器人第19課 - 按鈕控制風扇Scratch編程機器人第16課 - 智能鬧鐘?ABOUT DSBOT? 簡介:Scratch圖形編程,有脫機和實時互動兩種模式,配套有30多種傳感器,課程完善。詳細見》》:https://shop491350884.taobao.com
一學習導航
1.了解并安裝循跡傳感器
2.使用單個循跡傳感器制作沿黑線走的小車
二動手實踐任務描述:做巡線小車,讓機器人沿著黑線行走。
器材準備:?dsbot小車、循跡傳感器
01硬件搭建搭建車型機器人。將循跡傳感器用銅柱裝到小車底部,紅外管朝下,盡可能往外裝,方便調試電位器,并插到控制器P1端口。循線傳感器調整和使用請查看第30課定點停車

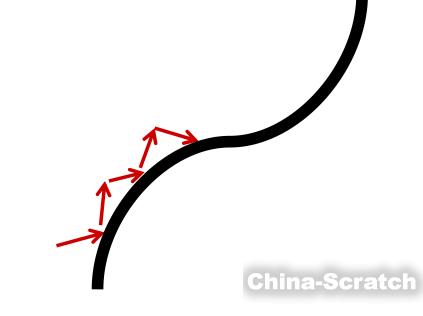
首先先來了解下單個傳感器機器人巡線原理。當傳感器檢測到黑線,小車向左拐,一旦傳感器檢測到地面時就立刻向右拐,就這樣循環重復就可以沿黑線行走了,如下圖。
 ??
??
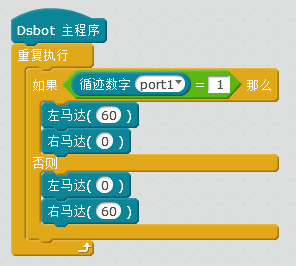
循跡在黑線的值為1,故判斷邏輯為“循跡數字=1”,可以調整左右兩邊的電機功率,讓小車又快又穩沿黑線跑。如果小車跑離線時,則要適當調低速度。如果小車穩定沿黑線跑時,也可以適當地調大速度,調整速度直到又快又不跑離線為準。
參考程序:
程序編寫完成后選中相應的端口和arduino模塊,然后點擊上傳?。當提示上傳完成時就可以了,小車能沿著黑線行走,如果有歪曲,也能及時調整,始終保持沿著黑線走。觀看效果。
三課外拓展巡線小車? ? ?巡線小車是一個很好鍛煉學生的實驗,可以用多個循跡傳感器共同巡線,最簡單是只用一個即可,首先找一塊干凈的地面,貼上準備好的黑色電工膠布,轉彎的時候盡可能增大轉彎半徑,在巡線之前,關鍵一步是調節傳感器靈敏度,即把小車的循跡傳感器置上黑線上面指示燈滅,置上地板上面,指示燈亮。調整好速度讓小車又快又不跑離線。
溫馨提示
如果你喜歡本文,請點贊和分享到朋友圈,如果您有不明之處,歡迎添加個人微信咨詢
往期精彩回顧Scratch編程機器人第18課 - 定時風扇Scratch編程機器人第19課 - 按鈕控制風扇Scratch編程機器人第16課 - 智能鬧鐘?ABOUT DSBOT? 簡介:Scratch圖形編程,有脫機和實時互動兩種模式,配套有30多種傳感器,課程完善。詳細見》》:https://shop491350884.taobao.com
聲明:本文章由網友投稿作為教育分享用途,如有侵權原作者可通過郵件及時和我們聯系刪除


相關資訊
